
Success in Developing Automated Excavator Loading Tasks for Construction Site Automation
ARAV Co., Ltd. (Bunkyo-ku, Tokyo), a UTokyo-based startup, successfully conducted a demonstration with Visper LLC for autonomous excavator operations, covering everything from excavation to loading dump trucks, and has begun commercialization.
This project was selected for the “FY2020 Michibiki Utilization Demonstration Project” by the Cabinet Office and Quasi-Zenith Satellite System Services, using centimeter-level positioning services for evaluation.
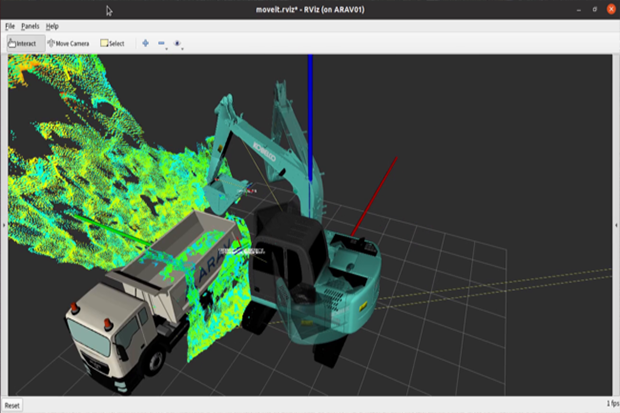
The system observes conditions via sensors like 3D LiDAR and GNSS, while ARAV’s motion planning technology autonomously calculates and executes movements to excavation and loading points.
ARAV aims for field deployment within 2021, specifically targeting soil-loading tasks to address operator shortages and improve safety.
See the press release for details. https://prtimes.jp/main/html/rd/p/000000003.000058931.html
-
Release
[Notice] We will conduct on-site experiences and technical lectures on autonomous and remote construction machinery at the “ICT Construction Site Experience Session Helpful for Small-scale Works” hosted by the MLIT Kanto Regional Development Bureau.

-
Release
We participated in the “e-Kenki® Challenge 2025” at EXPO 2025 Osaka, Kansai, Japan.
-
Release
Agreement reached on applying Hitachi Construction Machinery’s “RBT Core Connect”! Compatible models for the autonomous (unmanned) hydraulic excavator RX “Yoisho-Tonyu-kun” will be expanded.
Related Articles
-
Release2025.08.08
We participated in the “e-Kenki® Challenge 2025” at EXPO 2025 Osaka, Kansai, Japan.

-
Release2024.01.30
Won the Grand Prize in the Breakthrough Award category at the “Jikkenjo Contest” organized by KOKUYO LOGITEM Co., Ltd.

-
Release2023.05.24
Regarding the signing of a Memorandum of Understanding (MOU) with ITOCHU Corporation, ITOCHU TC Construction Machinery Co., Ltd., and Yazaki Corporation for the development of remote control systems for construction machinery and remote business construction.
