
Solution

Industrial Plants
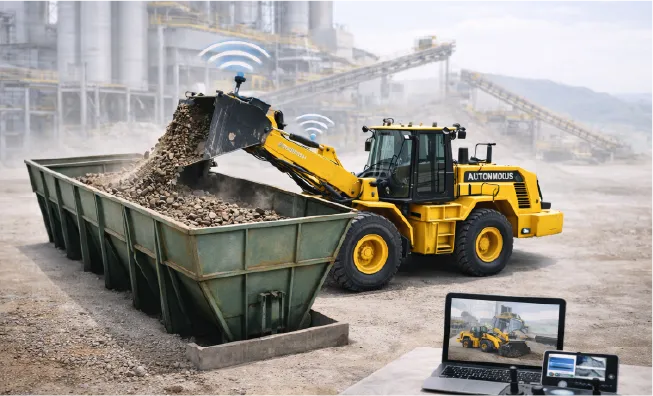
Fuel chip supply, raw material transport, scrap loading, etc.
Challenges
Risks of industrial accidents in harsh environments involving high pressure, high temperatures, and hazardous materials, combined with increasingly complex maintenance management. These issues have reached a critical point that conventional methods can no longer address.
Tasks in hazardous areas and equipment inspections in high or confined spaces—challenges that exceed human limits—are solved through teleoperation and automation technology.
This provides a clear path to industrial plant operations that achieve both safety and productivity for the next generation.

ARAV Solutions
We promote site-wide DX for various industrial plants, such as biomass and non-ferrous metals, through teleoperation and automation solutions for construction machinery.
Our goal is not just the DX of a single machine, but to provide a "Field Automation Platform" that optimizes operations across the entire plant site.
We contribute to improving safety, increasing efficiency, and resolving labor shortages across entire site processes beyond individual tasks.

Target Processes for Teleoperation and Automation


Promoting Site DX Through Phased Implementation
Example Scenarios
Phase 1
Small Start - Demonstrate value starting with a single unit
Initially, we start with the teleoperation or automation of a single wheel loader or hydraulic excavator. We select tasks where challenges are expected based on consultation and site requirements.
We approach challenges at each site, such as resolving high workloads and burdens from single-operator tasks, early morning/late night shifts, labor shortages, operational efficiency, or the burden of working in areas with hazardous, infectious waste, or dust.
Based on the results from a single machine, we propose further DX promotion through future scalability and safety improvements.
Phase 2

Horizontal Expansion - Scaling to multiple units and proposing automation
After verifying practicality with a single machine, we propose the teleoperation or automation of subsequent units for specific work areas or sites.
Teleoperating or automating multiple units involved in waste acceptance/reloading, feeding sorting lines, and loading recycled materials leads to isolating operators from high-risk areas and improving the work environment at recycling/industrial waste treatment sites.
Phase 3

Final Phase
Our final vision is to further increase the number of teleoperated and automated machines to create unmanned operations and an environment free from constraints of time and location.
This contributes to resolving chronic labor shortages, pursuing zero accidents, and maximizing processing capacity and stable supply at recycling/industrial waste treatment sites. We aim for a site-wide DX that cannot be achieved by the automation of single machines alone.