
研究開発 R&D
スマート家畜ふん尿処理コンソーシアムの
堆肥化ロボットの研究

概要 Overview
本プロジェクト概要
2022年度より、生物系特定産業技術研究支援センター「戦略的スマート農業技術等の開発・改良」(JPJ011397)の支援を受けて実施している、堆肥化ロボットの研究成果について記載いたします。
堆肥化ロボットとは
現在、研究開発を進めている堆肥化ロボットとは、文字通り、「堆肥化をロボットが自動で行えるようにしよう」というコンセプトの元で、取り組んでいるプロジェクトの成果目標となります。
本研究開発におけるロボットの位置付けとしては、既に販売され市場に導入されている既存の機械(建設機械にあたるホイールローダー)に、機器やセンサーにあたるハードウェアを後から設置し、それらをソフトウェアで制御することで、自律駆動を可能とする機体を作り上げようというものです。
堆肥化とは
畜産農家さまでは、牛や豚、その他家畜から排泄される動物のふん尿を、堆肥とする作業が存在します。
”堆肥とは、易分解性有機物が微生物によって完全に分解された肥料あるいは土壌改良剤のこと”
引用元wikipedia URL:https://ja.wikipedia.org/wiki/%E5%A0%86%E8%82%A5
上記記載の分解の部分を、人為的に加速させることを堆肥化と呼んでいます。
研究開発 Research Development
研究開発の背景
畜産農家の義務
家畜ふん尿処理は適正処理しなければならない
・搾乳ロボットや肥育成豚のオートソーティングはスマート化・自動化される
・ふん尿処理はまだスマート化がすすんでいない

・ふん尿処理はスマート化により、畜産業全体のスマート化につながる
・自動化できれば、農家は家畜管理に集中でき経営効率の向上が考えられる
実施内容 Action
① ホイールローダーの走行と堆肥すくい制御
堆肥舎内など屋内での自律走行のため、GPSではなくLiDARによる自己位置推定(SLAM)を実装。
車体下部にセンサを追加し、同一形状の発酵槽が連続する場合にも安定した自己位置認識を可能に。
また運搬時のバケット位置制御のために前方に検知用センサを設置。
② 経路追従制御
アーティキュレート角度制御の為、回転角度センサを設置し、壁に対する距離、ライン取り、ステアリング操作量をコントロール。
③ 堆肥舎内で実証実験
実際の堆肥舎内における、水分量を多く含んだ牛糞、乾燥したおがくずなど異なる対象物に合わせたアームバケット動作の切り替えと走行の実証実験済。
ホイールローダーの遠隔操作システムの改善と再実装
建機全体

正面
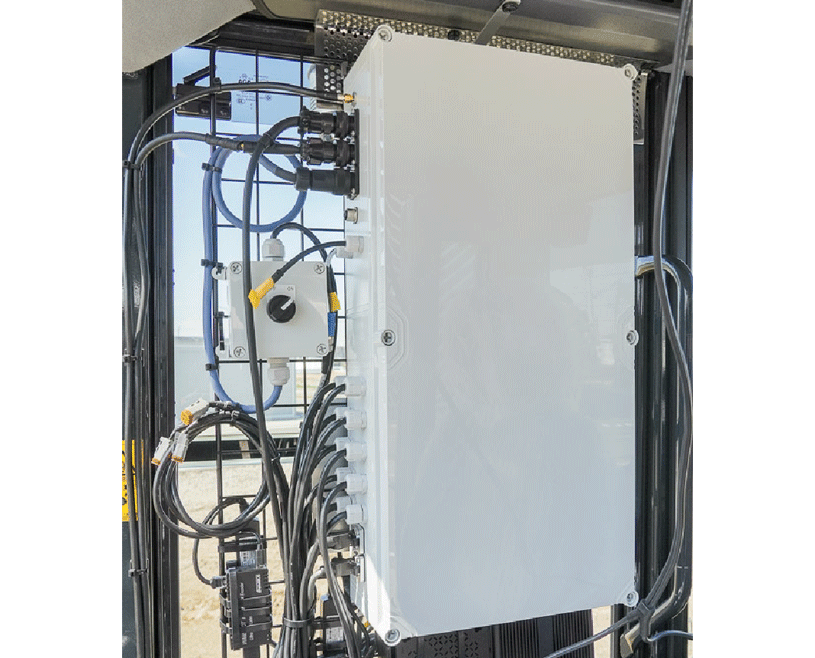
制御装置
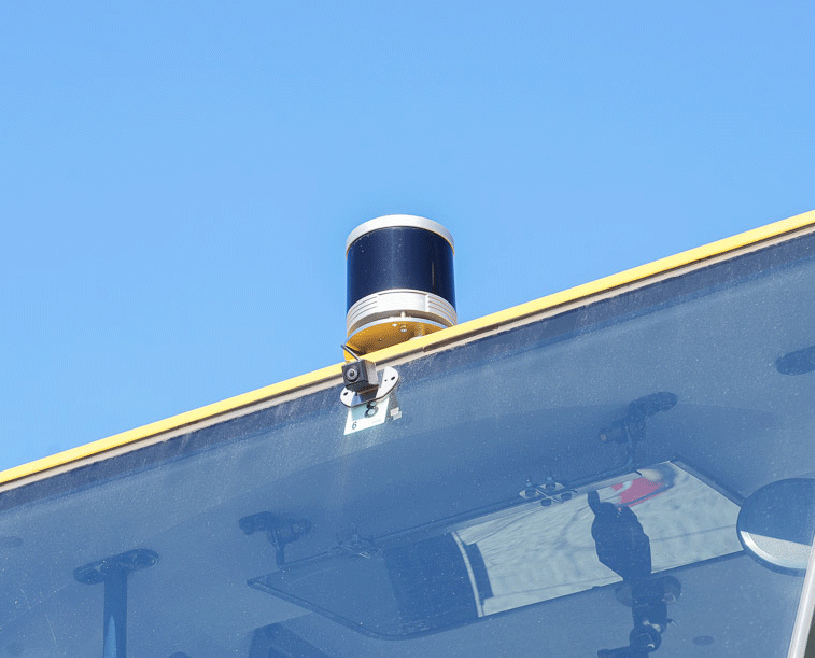
自律走行用のセンサー(トップ)
各操作部

①ペダルの操作部

②ステアリングの操作部
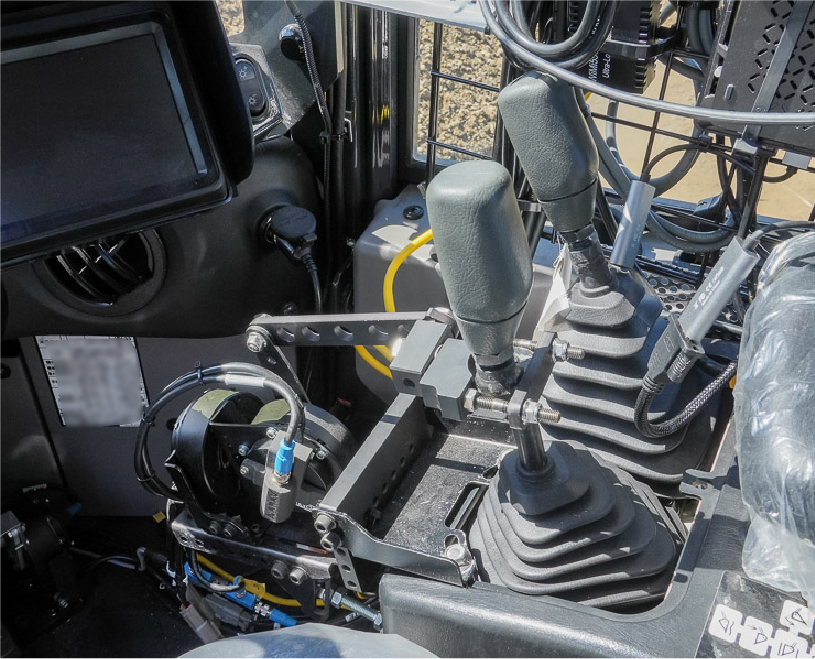
③ジョイスティックの操作部
①ペダルの操作部:制御モーターとリンク機構を設置
②ステアリングの操作部:制御モーターとギア機構を設置
③ジョイスティックの操作部:制御モーターとリンク機構を設置

④アクセル・ブレーキペダル

⑤インチングブレーキペダル

⑥ステアリングとギアメカ
④アクセル・ブレーキペダル:アクセル・ブレーキペダルを制御するための後付けモーターとリンク機構
⑤インチングブレーキペダル:インチングブレーキペダルを制御するための後付けモーターとリンク機構
⑥ステアリングとギアメカ:ステアリングを制御するためのギアメカを後付け
遠隔の事例

ホイールローダー正面の映像

遠隔操縦の様子

遠隔操縦席
遠隔操縦:建機内外のカメラからモニターに送られてくる映像をもとにジョイスティックとステアリングで建機を遠隔操作
遠隔操縦席:建機内外のカメラから送られてくる映像を映すモニターと建機を遠隔操作するためのジョイスティックとステアリング
シミュレーションによる移動経路算出機能の確認
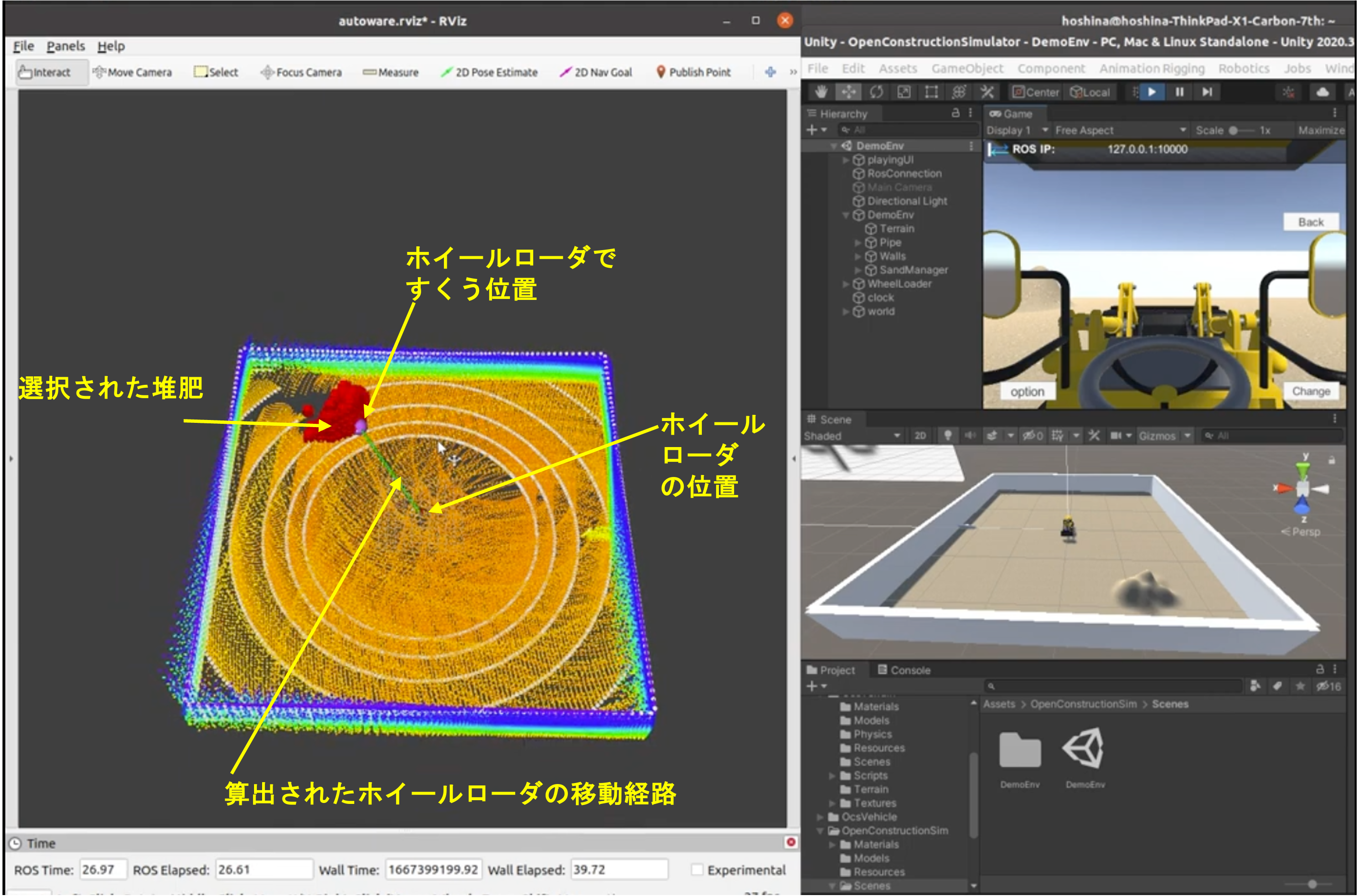
集積された堆肥を選択することでホイールローダーからすくう位置までの走行経路を算出。

ROS(Robot Operating System:ロボット用のソフトウェアプラットフォーム)上に実装した制御機能が走行経路を参照し、ホイールローダーがすくうエリアに向かって前進。
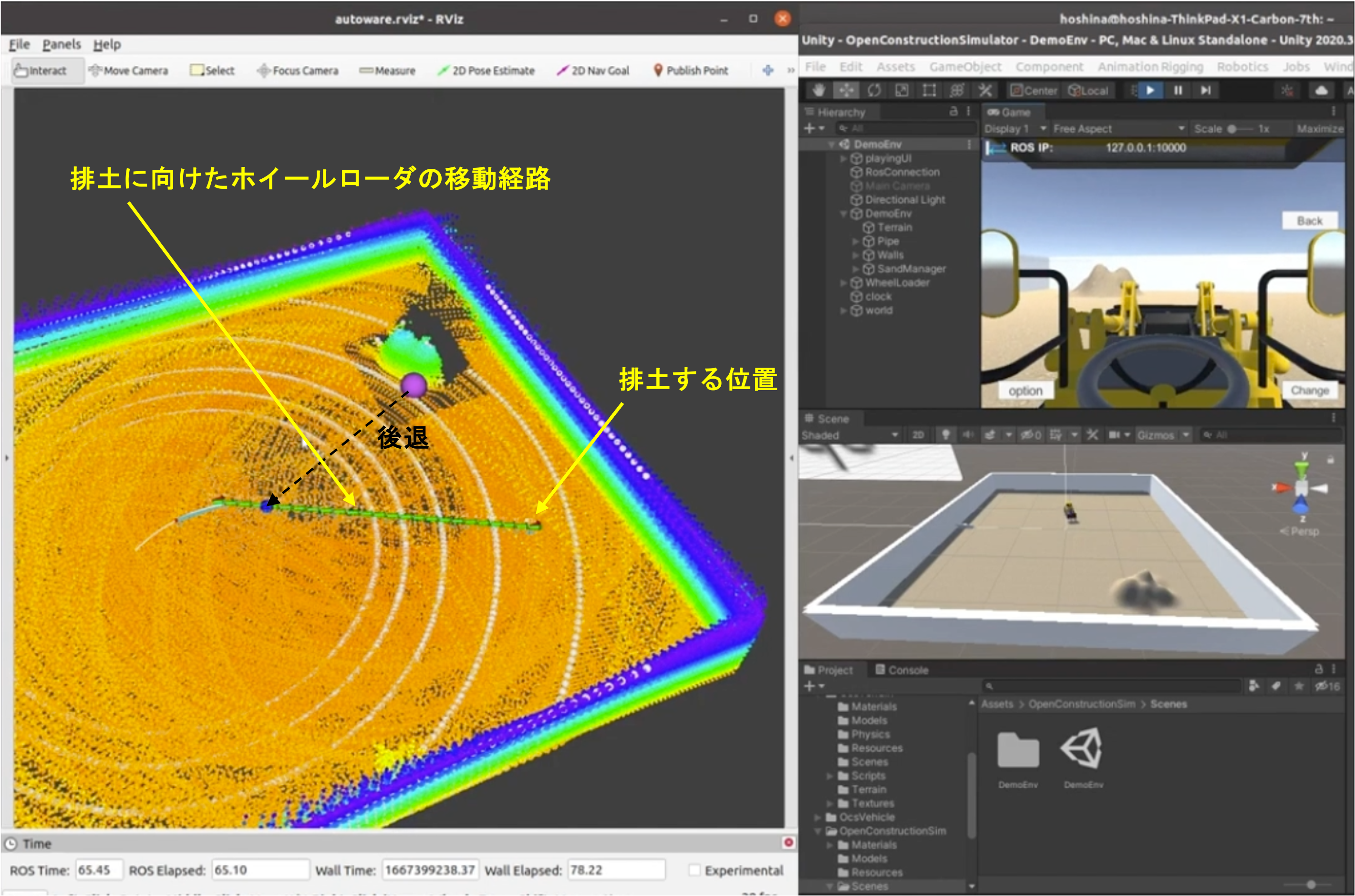
排土に向かう途中。このあと後退で元の位置に戻り、再びすくう位置までの移動を繰り返す。

排土に向かう途中。このあと後退で元の位置に戻り、再びすくう位置までの移動を繰り返す。
将来像 Vision
畜産農業のスマート化「堆肥化作業を自動化する」
堆肥化ロボットプロジェクトの先にあるもの
畜産農家さまにて堆肥化に利用されている機械は、土木・建設現場用を想定して開発された建設機械のホイールローダーであることが大半です。
実際、本プロジェクトにおいて研究・開発に取り組んでいる堆肥化ロボットも国産メーカーが開発し既に販売されているホイールローダーを実験対象機としています。
ARAVは今回のように、既に市場にて利用されているホイールローダーを後付けのアタッチメントやソフトウェアを用いることで遠隔操作化や自動化することを強みとしていますが、ホイールローダー以外の他の建設機械の対応も見据えています。(油圧ショベル等一部に既に実装済み)
農家さまにおいて利用されているホイールローダー以外の建設機械、あるいは建設機械類似の機械においても、本プロジェクトの成果を活かすことで遠隔操作化や自動化等、スマート化に近付けることが可能になると、考えています。
畜産農家さま堆肥化関連のお困りごと

堆肥化とは、必ずしも畜産農家さまの経営に良い影響を与えるものではありません。堆肥の用途は、基本的には排泄物が発生した畜産農家さま自身の元で利用することが主で、販売ひいては収益に繋がるという流れは極めて稀なことだからです。
畜産業の義務として、「家畜糞尿処理は適正処理されなければならない」という決まり事があります。この適正処理が正に堆肥化に当たるのですが、水分調整や通気性の確保等、考慮しなければならない点が幾つかあります。そうしたときに、施設の運用費用がかかってしまうのが課題です。


堆肥化作業の先に充分な分解を経た堆肥とするためには、一定期間(数週間〜数ヶ月間)毎週どこかのタイミングで、人が搭乗して操作する大型機械を使って堆肥化作業を行わなければなりません。微生物による分解は100%調整できるものではないため、ときには多大な時間と労力、そしてインシデントへの対応を要するときがあります。